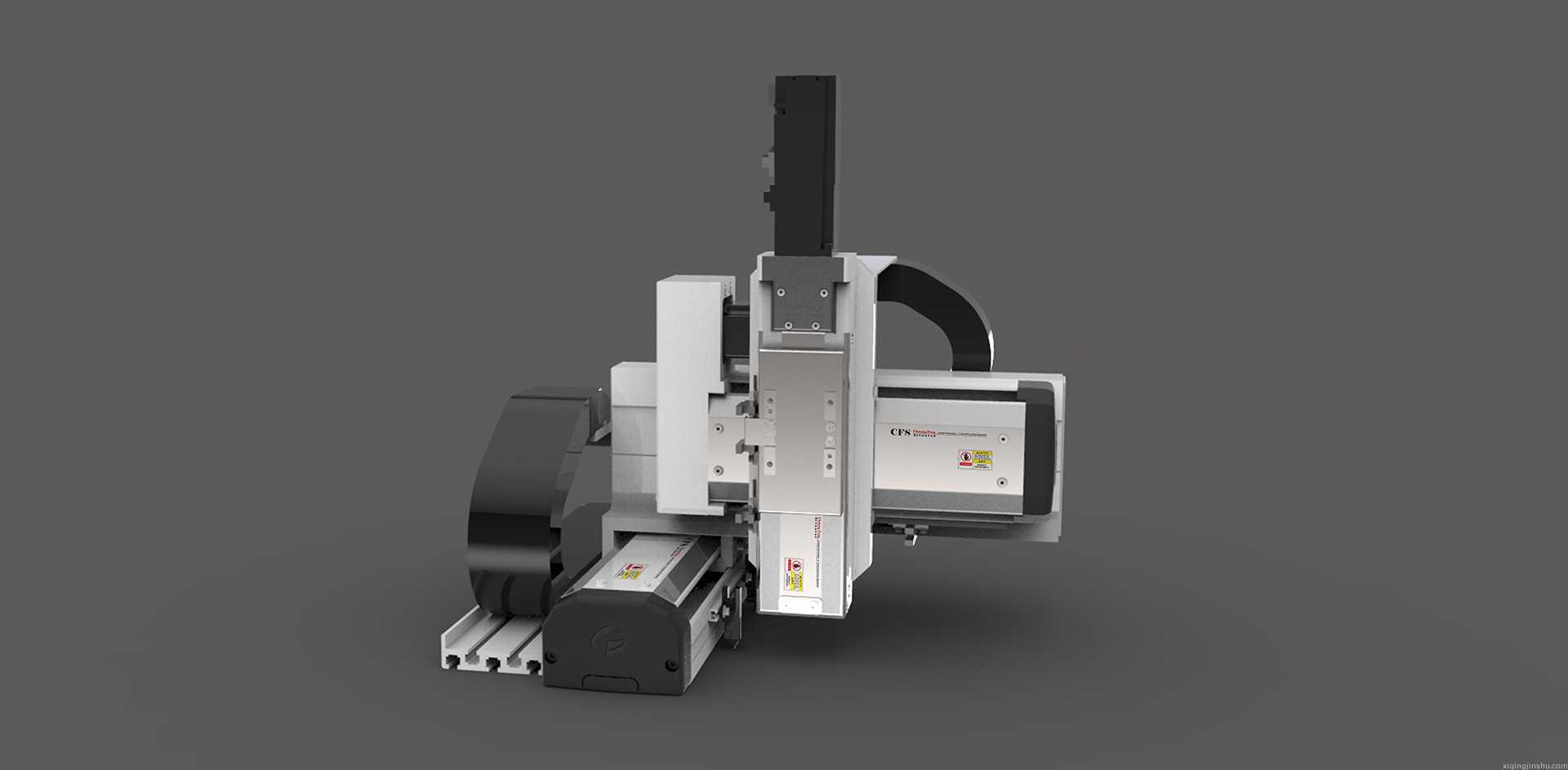
爱普生LS20 SCARA机器人非常适用于那些追求高性价比的工厂。由于采用基于EPSON QMEMS的余振控制技术,相比于在增加负载时必须降低速度和加速度的同类机器人,LS20 SCARA机器人可以在高速运行时承担较高负载。LS20 SCARA机器人适用于更高负载的方案,如大型构件取放、机器装载/卸载、码垛堆积、机械组装、工业部件转移等。凭借出色的高性能与合理的运行价格,爱普生LS20成为性价比要求较高时的优选机器人。
即使在较高负载下,也拥有快速的循环吞吐量
业内较强的易用性
800毫米和1000毫米臂长
可提供ISO 4级洁净型号




















?2021-2031 苏州赛德瑞自动化科技有限公司 版权所有苏ICP备2021016287号-1技术支持:万度网络